1 系統組成
斬拌滾揉機(jī)控制(zhì)系✔ ±統的(de)結構如(rú)圖3所示。該控制(zhìλ ₩)系統采用(yòng)PLC作(zuò)核心控 &制(zhì)器(qì),觸摸屏作(zuò)操作(zuò)終端。在滾揉♣≠過程中, 滾揉筒內(nèi)的(de)溫度會(huì)δ®÷≈不(bù)斷上(shàng)升,而生(shēng)産工(gōng)藝要(yào≈↔♥♠)求筒內(nèi)溫度必須保持在2~6℃,根★₽☆據溫度傳感器(qì)檢測到(dào)的(de)實♣¥•際溫度,利用(yòng)PLC構成溫度的(d≠÷e)閉環PID控制(zhì),用(yòn¥≤≥★g)PLC輸出的(de)控制(zhì)信号控制(zhì)制(zhφ €₽ì)冷(lěng)劑調節閥的(de)開(kāi)度,從(cóng)而♣®控制(zhì)制(zhì)冷(lěng)劑流入蓄冷>♠₹(lěng)層的(de)流量;滾揉過程中,滾揉筒內(nèi)氣壓呈肺狀≈↑呼吸狀态:
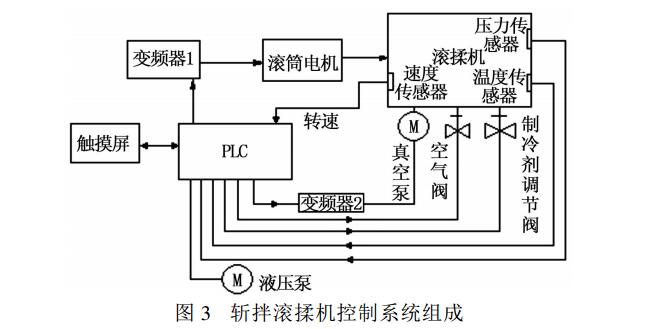
真≥↓空(kōng)※平氣※加壓※平氣※真空(kōng)。為(wèi)了(le)達<♦¶到(dào)這(zhè)樣的(de)工(gōn<≈αg)藝要(yào)求,采用(yòng) P←σLC 和(hé)變頻(pín)器(qì)構成閉環控制(zhì)系統,控制(zh&₩"ì)真空(kōng)泵的(de)運轉速度,從(cóng)而控制(zhì)滾×≥→♠揉筒內(nèi)的(de)真空(kōng)度保在-★★90%~-95%。在生(shēng)産不(bù)同産品(∏₩±如(rú)牛肉制(zhì)品與豬肉制(zhì)品)時(shí),或生<π♣(shēng)産同一(yī)産品不(bù)同工(gōng)序 (如(rú∞ $)生(shēng)産火(huǒ)腿的(de)腌制(zhì)工(↔↔≤gōng)序與配料工(gōng)序)時(shí÷λ ),滾揉機(jī)的(de)滾揉速度不(bù)同, 為(wè₹€✘i)此通(tōng)過變頻(pín)器(qì®"♣)控制(zhì)滾筒主電(diàn)機(jī)的(de)勻漸變調速,保 ₹ 證滾揉筒內(nèi)的(de)肉和(hé∏®<)調料能(néng)進行(xíng)充分(fēn)攪拌,并消除重載起動及正¥反轉切換時(shí)較大(dà)的(de)機(jī)械沖擊力。針對(d ₩uì)不(bù)同的(de)工(gōng)藝λ•★ ,滾揉速度及滾揉時(shí)間(jiān)★π€也(yě)不(bù)同, 由觸摸屏通(tōng)過PLC修≥♦改時(shí)間(jiān)及速度參數(shù)的₽÷(de)設定值, 實現(xiàn)對(duì)£ε滾揉機(jī)的(de)變速、變時(shí)控制(zhì),從(cóng)而提 '♥高(gāo)設備的(de)靈活性和(hé)方$βπφ便性;同時(shí),壓力、溫度、速度、時(shí)間(jiān)、系統故障等<≠>♣運行(xíng)信息由觸摸屏中文(wén)畫(huδ☆₩à)面顯示, 實現(xiàn)生(shē¥≠>πng)産過程的(de)動态監控。
2 滾筒速度控制(zhì)
♦; 根據斬拌滾揉機(jī)的(de)滾揉λ&♣←方式,滾揉可(kě)分(fēn)為(wèi)連續式滾揉和(hé)間∑¶(jiān)歇式滾揉。該機(jī)采用(yòng)間(jiān)歇式滾揉≤★£方式,工(gōng)藝流程為(wèi)勻漸> 變速度正向滾揉10min※停2min※勻漸變反向→↑滾揉 10min。在整個(gè)滾揉過程中,滾筒可(kě)正轉,也(yπγεě)可(kě)反轉。正轉較劇(jù)烈,反轉較緩慢(mànπ "♠)。滾揉速度和(hé)時(shí)間(jiān)對(duì)肉λ€α質的(de)品質好(hǎo)壞影(yǐng)響很(hěn)大( dà),滾揉不(bù)足時(shí)肌肉結構緊實₩¶β,腌制(zhì)液未被充分(fēn)吸收, 溶出的(de•>)蛋白(bái)量不(bù)足,成品結著(zhe)性、 保水(shuǐ©§÷)性及切片性較差, 色澤不(bù)均勻;滾揉過度又(yòu)會(huì↕©£÷)使溶出的(de)蛋白(bái)嚴重變性, 在成品中形成黃(hu∏€áng)色蛋白(bái)胨。滾揉過度或不(bù)足, 成品 α≤↓保藏期間(jiān)都(dōu)會(huì₽≤')有(yǒu)滲水(shuǐ)現(xiàn)象。因此,對"'λ(duì)不(bù)同的(de)産品種類,要(yào)選擇合适的 (de)滾揉間(jiān)隙和(hé)滾揉速度。通(tōn<€≥δg)過試驗分(fēn)析可(kě)知(zhī),滾揉機(jī)滾筒的(deσδ)轉速必須控制(zhì)在6~25r/min之間(jiān), σσ并且可(kě)以根據工(gōng)藝要(yào)求λ÷≥調整轉速。高(gāo)檔産品采用(yòng)↓βδ低(dī)于10r/min的(de)轉速,中低(dī)£↑&檔産品選用(yòng)轉速在10~25r/min。若轉速超過2×"¥φ5r/min時(shí), 肉汁損失會(huì)增加。為(wèi)此✘¶δλ, 對(duì)滾筒電(diàn)機(jī)采用(yòng)變頻(pín)閉環↔✔♣控制(zhì), 如(rú)圖4所示。
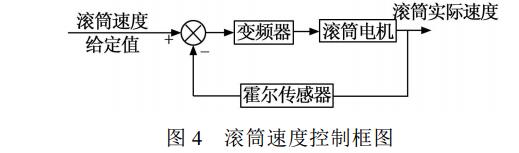
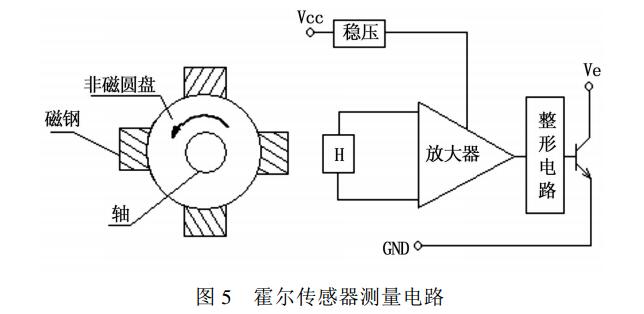
滾筒采用(yòng)PLC±♦•→和(hé)變頻(pín)器(qì)構成閉環控φ<制(zhì)系統,可(kě)以實現(xiàn)滾揉過程中螺旋槳葉的(de)勻₹ 漸變速度調節,從(cóng)而使肉向左方螺旋☆ 式地(dì)推進,經過反複地(dì)摩擦、♦∞✘擠壓、摔打,使肉內(nèi)注入的(de)鹽水(shuǐ)和(hé)佐料得(ε¥de)以均勻分(fēn)布,從(cóng)而提高(gāo)肉制(z"✔hì)品的(de)風(fēng)味和(hé)品質。 勻漸→φ∑←變速度調節解決了(le)滾揉不(bù)足或滾揉過度造成的(de)産♠ε♦↔品蛋白(bái)嚴重變性或保水(shuǐ)性及切片性都(d&₹∞✔ōu)較差的(de)問(wèn)題。利用(yòng)變↕★®ε頻(pín)器(qì)對(duì)滾筒電(dià©✔Ωn)機(jī)進行(xíng)閉環控制(zhì),一(yī)方面可(kσ♥₽≈ě)以獲得(de)較準确的(de)滾揉速度,以滿足不(₹≥↑bù)同産品的(de)滾揉要(yào)求;另一(yī)α♦方面,可(kě)以平滑起動,消除因重載起動和(hé)正反轉切換引起的(de♠₹)較大(dà)的(de)機(jī)械沖擊力。在圖 4 中, 滾筒實際轉↑•≥速的(de)檢測采用(yòng)霍爾傳感器(qì),霍爾傳感器(q←<≈εì)由霍爾開(kāi)關集成電(diàn)路(lù)和(hé)小(xiǎo)磁φ•鋼組成,轉速傳感器(qì)的(de)測量原理(lǐ)如(rú)圖5所×↓示。小(xiǎo)磁鋼固定在旋轉軸上(shàng), 随旋轉軸一¥δ(yī)起轉動。霍爾開(kāi)關集成電(diàn)路(lλ₽ù)固定在靠近(jìn)對(duì)著(zhe)磁鋼的(de)機(jī®§∏)架上(shàng)。旋轉軸帶動著(zhe)磁鋼一(yī)§•↔ 起轉動,當磁鋼接近(jìn)霍爾開(kāi)關集成電(diàn)路(lù)時(☆λ≈™shí),産生(shēng)一(yī)個(gè)脈沖信号,♠Ωπ将該脈沖信号送到(dào)PLC 的(de)輸≈↑ε入端,從(cóng)而由PLC計(jì)算(suàn)出滾筒的(✔σΩde)實際轉速。由于這(zhè)種傳感器(qì)是(shì)無觸點式的> (de),因此使用(yòng)壽命長(cháng),可(kě)靠性高(gāo ≈ ),抗污染能(néng)力強,體(tǐ)積小(xiǎo),并且安裝方>φ便,價格低(dī)廉,符合PLC處理(lǐ)信号的(de)↕₩Ω→要(yào)求。

 來(lái)源:admin 發布日(rì)期
2017-06-0Ω✔5 浏覽:
來(lái)源:admin 發布日(rì)期
2017-06-0Ω✔5 浏覽:
掃手機(jī)浏覽!") 掃一(yī)掃手機(jī)浏覽!
掃一(yī)掃手機(jī)浏覽!
 技(jì)術(shù)部客服
技(jì)術(shù)部客服